Conventional
stepper motors cannot accommodate large diameter hollow shafts without
sacrificing torque and performance. Torque is dependent on the size of the
magnet placed in the rotor. A large diameter shaft reduces space available for
the magnet, thus sacrificing torque. Since we’ve moved the magnet from the
rotor into the stator stack, we can accommodate a large shaft without
sacrificing torque or performance. Oyostepper, the motion component and systems
specialist, further expands its range of stepper motors with the new
competitively priced HH series hollow shaft motors from its USA distribution
partner Applied Motion Products Inc. (AMP).

With high-torque NEMA 17 and 23 motor frame options in a choice of stack lengths, the hollow shaft facilitates direct assembly of a lead screw without the need for a coupling - keeping hardware to a minimum and simplifying design for machine builders. The hollow shaft stepper motor also allows customised shafts or other power transmission components to be quickly added to the motor without the often-long lead times that specials may take and also enables small quantities of specials to be produced at reasonable cost. The internal shaft diameter for the 17 and 23 frame motors is 5 mm and 8 mm respectively. The holding torque across the 2-phase HH series ranges from 0.45 to 2.3 Nm with current ratings from 2 to 3 A per phase (series).
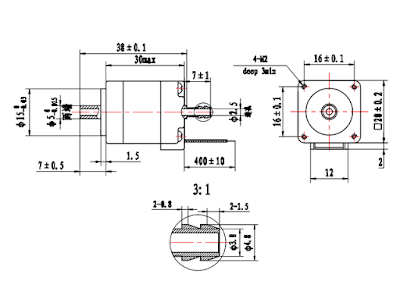
Large
Holow Shaft Up to 11 mm in Diameter


The
motors are supplied with a detachable lead/connector pigtail for
straightforward installation in the customer’s application. The 200/step/rev
motors can be used with stepper drives across the AMP range, including the micro
stepper motor for sale ST5 which offers sophisticated current control and
multiple motion control options from simple streaming commands to communication.
And it works closely with a small number of global motion control manufacturers
and with its own in-house design and manufacturing capability the Hampshire
based motion specialist offers complete integrated mechatronics assemblies with
customised mechanics, gearheads and other power train components.










